

ECCV 2022 Urban3D

近日,两年一届的欧洲计算机视觉大会European Conference on Computer Vision,简称ECCV)在以色列特拉维夫举行。ECCV和CVPR、ICCV是计算机视觉领域三大顶级国际会议,影响力度最强,公认程度最高。
第二届城市大规模语义点云理解分析挑战赛(The Second Challenge on Large Scale Point-cloud Analysis for Urban Scenes Understanding, Urban3D)由欧洲计算机视觉大会与南加州大学(University of Southern California - Institute for Creative Technologies,)、牛津大学(University of Oxford)、香港理工大学(The Hong Kong Polytechnic University)、帝国理工大学(Imperial College London)、国防科技大学、中山大学等高校共同举办。该竞赛主要围绕如何赋予机器理解现实3D世界物体(建筑物、桥梁、树木、汽车、河流等等)的语义信息展开,分为语义分割赛道和实力分割两个赛道。
组织者:
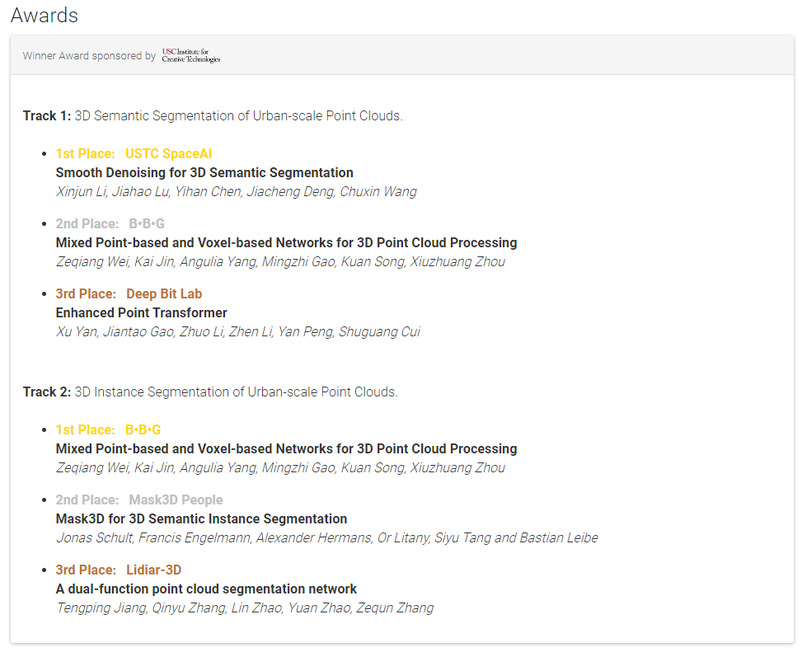
本次大规模语义点云理解分析挑战赛共吸引了来自全球世界各地著名高校与研究机构的1000多名研究人员,超过300多个团队参与其中。公司蒋芸教授的二年级研究生张泽群、蔺想红教授的二年级研究生赵远与武汉大学测绘遥感信息工程国家重点实验室的博士生,南京师范大学地理科学学院的硕士生组建团队Lidar-3D,充分发挥多学科碰撞交叉优势,获奖方法“A Dual-function Point Cloud Segmentation Network” 结合了目前点云语义理解模型的特点并充分吸取了两团队的研究优势,斩获了Urban3D实例分割赛道的季军。
因成绩优异,张泽群同学获邀参加了ECCV 2022的International Workshop on Urban-Scale Point Clouds Understanding进行方法汇报。获奖方法提出了结合PointNet++和 PointConv的共享特征编码器、语义信息和实例信息分离的双路解码器、双路语义实例特征融合器等。上述组件进一步提高了方法的鲁棒性,并可达到理解3D场景的速度与精度之间的均衡。相比于其他队伍采用的方案,获奖方法的模块性更强、即插即用性高、可扩展性强。
两赛道排名情况:
获奖证书:

此后,张泽群同学与南京师范大学团队深化合作,将该方法泛化到面向真实开放世界的3D场景语义分割中,并参加了10月23日在日本京都召开的国际智能机器人与系统会议上的第十三届智能车辆规划、感知和导航研讨会(International Conference on Intelligent Robots and Systems, IROS ;13th Workshop on Planning, Perception and Navigation for Intelligent Vehicles;IROS与ICRA并称为是世界上最大的机器人技术国际会议)。该探讨会主办了面向开放世界(3DOW)的三维语义分割挑战赛(3D Semantic Segmentation to the Open World (3DOW) Challenge,由北京大学主导),团队参加了该项国际赛事,并荣获该项赛事的季军。
获奖证书:
地址:兰州市安宁区安宁东路967号
邮编:730070
电话:0931-7971821
版权所有 beat365正版·(中国)唯一官方网站-最新手机APP下载